Nathaniel Simon, PhD

I am a Perception Software Engineer at Zoox (based in Boston), building the future of autonomous, rider-centric transportation. I am thrilled to be on the Scene Understanding team, which uses a mix of machine learning, computer vision, and planning techniques to navigate challenging driving conditions. Our team specializes in abnormal (yet safety-critical) situations (e.g., construction zones or flaggers directing traffic). It’s an exciting time to be at Zoox – join us!
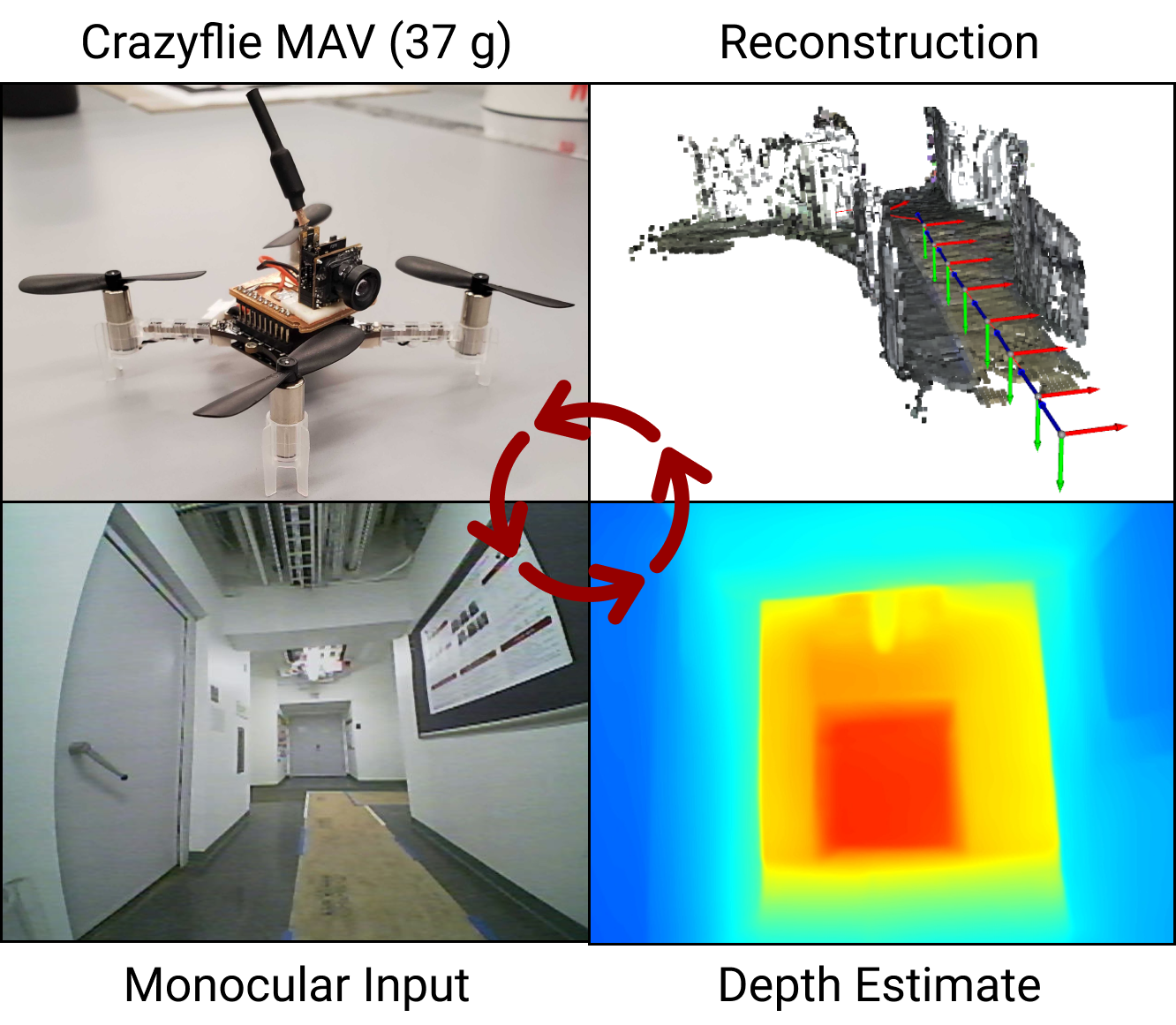
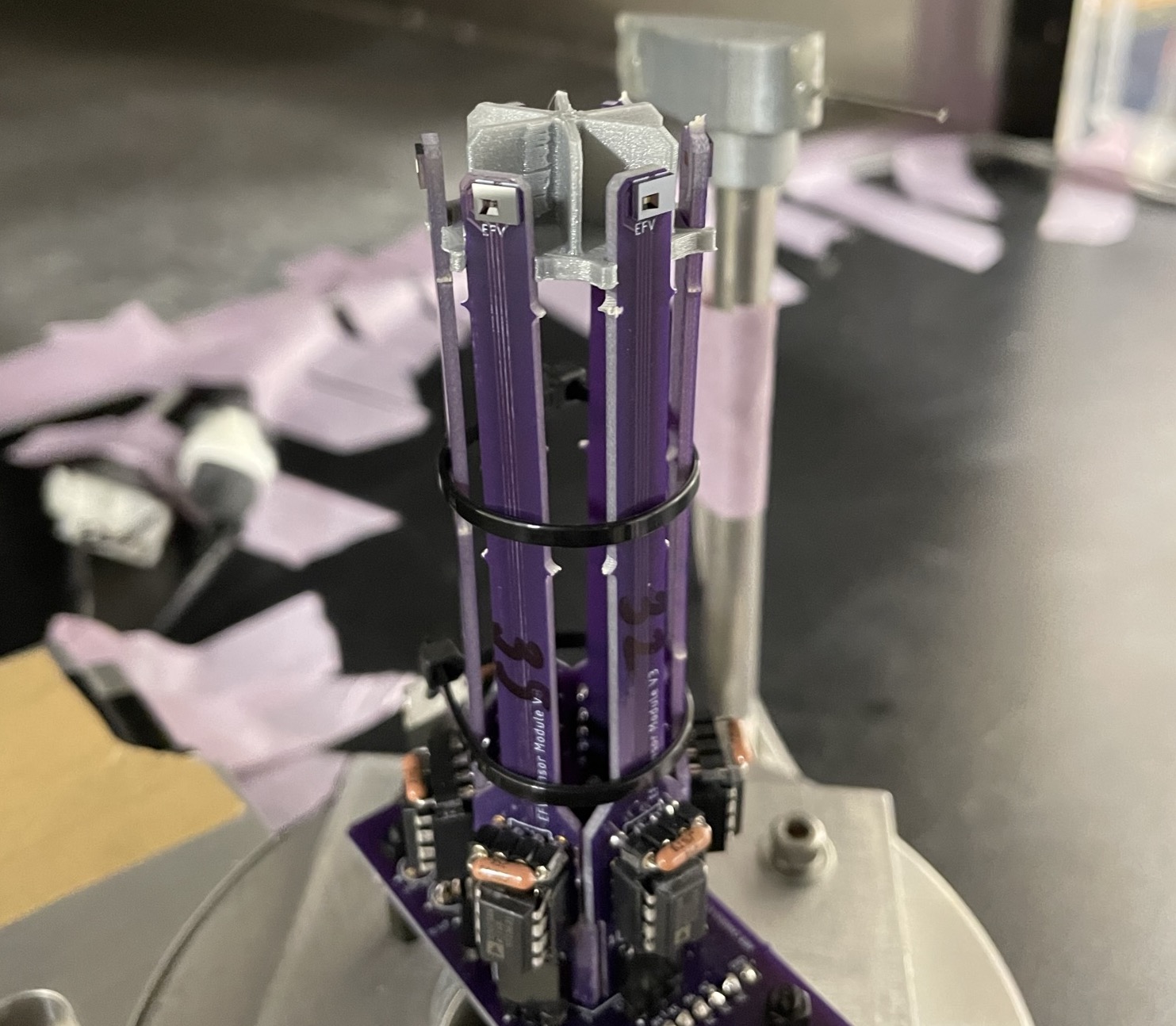
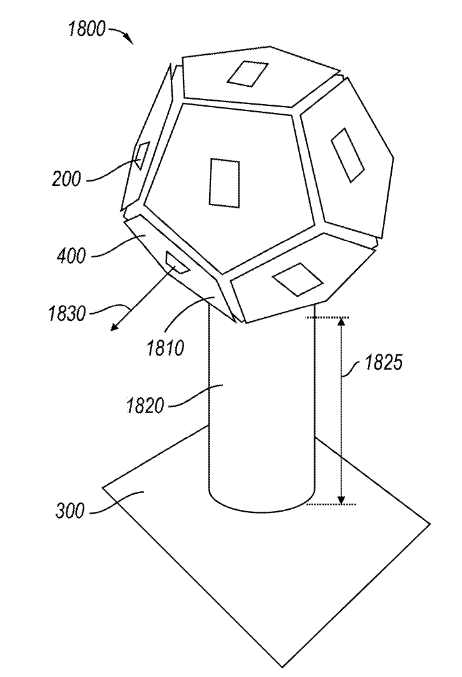
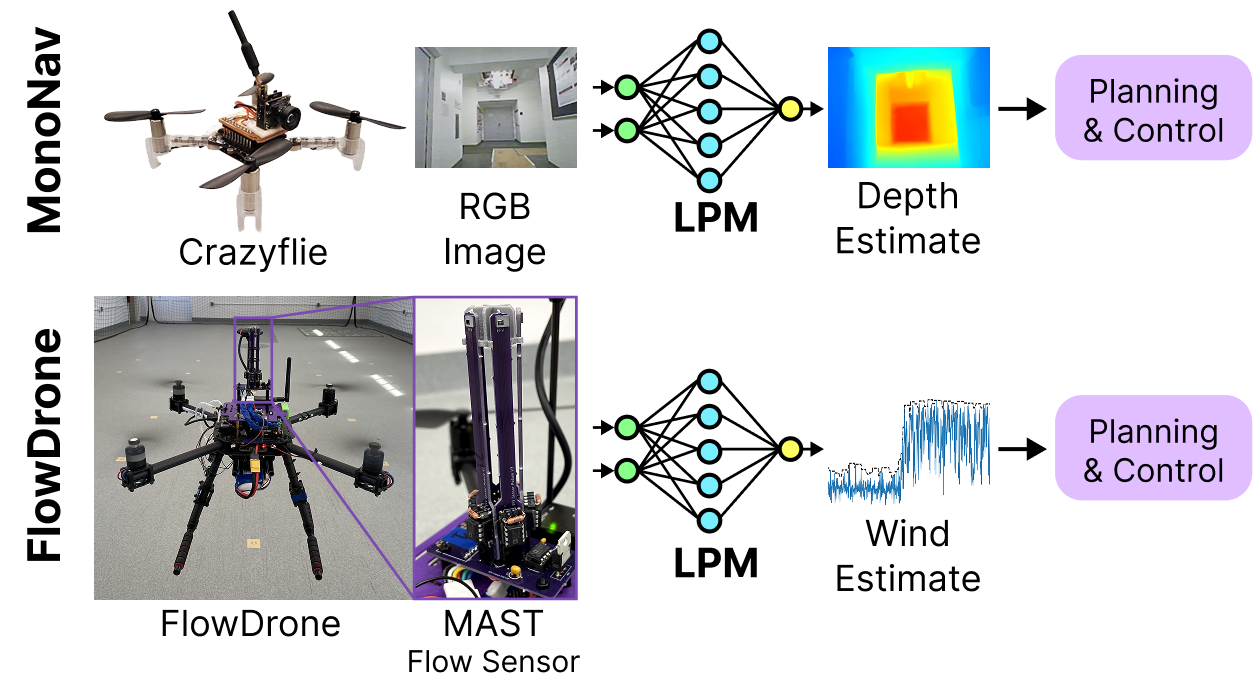
I recently earned my Ph.D. in Mechanical and Aerospace Engineering from Princeton University, where I was in the Intelligent Robot Motion Lab and FAST Group, co-advised by Ani Majumdar and Marcus Hultmark. My dissertation research improved aerial vehicle performance in the real world through tightly-integrated perception, planning, and control. Specifically, using high-dimensional sensors (such as vision and flow sensing) and machine learning to unlock new capabilities. During my PhD, I invented an omnidirectional flow sensor for UAVs (patent) and developed a wind-aware flight controller for gust rejection (FlowDrone). In addition, I advanced state-of-the-art in monocular micro aerial vehicle navigation through simultaneous depth estimation and 3D reconstruction (MonoNav).
Here is a 3-min snippet of some of this work, from Princeton Research Day:
Prior to the PhD, I received bachelor’s and master’s degrees in Mechanical Engineering from Stanford University. Outside of work, I love to fly aircraft, and I was a member of both the Princeton Flying Club and Soaring Tigers. I earned my instrument rating in 2023, and have written about my experience here.
Feel free to contact me through LinkedIn or at nathaniel.simon at alumni.stanford.edu.
news
| May 5, 2025 | New Job Alert! I started my job at Zoox as a perception software engineer, based in Boston. I am thrilled to be building the future in autonomous, rider-centric transportation! |
|---|---|
| May 1, 2025 | I successfully defended my Ph.D. dissertation, the culmination of 5 years of research under the supervision of my amazing advisors. I am so grateful to share this experience with so many of my peers, collaborators, friends, and family. |
| Oct 28, 2024 | New paper alert! Check out: “Distributed feather-inspired flow control mitigates stall and expands flight envelope” in PNAS. Links to News coverage and Youtube video. |
| Oct 25, 2024 | I was thrilled to be a finalist in the Amazon Robotics PhD Student Competition, and to speak at the Fall Research Symposium about MonoNav! |
| Jun 3, 2024 | I will be spending the summer in Santa Cruz, CA at Joby Aviation as a Flight Research Software and Controls Intern! |
| Mar 15, 2024 | I will be giving a talk at UPenn’s GRASP Lab Group Meeting Thank you, Fernando, for hosting! |
| Feb 12, 2024 | We released code for MonoNav, including out-of-the-box demos for depth estimation, fusion, and planning. No robot needed! |
| Jan 11, 2024 | LaDrone, our platform to track individual particles in the atmosphere using micro aerial vehicles, was featured on the front page of APS News! Article: “Drones Blowing, and Flying, In The Wind” |
| Oct 5, 2023 | MonoNav received Best Paper at the Learning Robot Super Autonomy Workshop at IROS 2023! |
| Sep 10, 2023 | Our paper: MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction, was accepted to ISER 2023! (Project Page.) See you Chiang Mai! |
| Sep 2, 2023 | I’ll be presenting some new work at the Learning Robot Super Autonomy workshop at IROS: MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction. See you in Detroit! |
| Sep 1, 2023 | I’ll be speaking at APS DFD in Washington, DC! Go with the Flow: Micro Aerial Vehicles as Lagrangian Particles in the Atmospheric Boundary Layer. |
| Aug 30, 2023 | Our paper, Online Learning for Obstacle Avoidance, was accepted to CoRL 2023! See you in Atlanta, GA! |
| Aug 3, 2023 | I will be speaking about UAV gust rejection at the PX4 Developer Summit 2023 in New Orleans, LA! See you 10/22! |
| Jul 13, 2023 | I received the Crocco Award for Teaching Excellence, for my work as a teaching assistant in MAE 345/549 Introduction to Robotics! |
| May 11, 2023 | I am thrilled to have received the Outstanding Presentation Award at Princeton Research Day for my 3-min video: “Improving Drone Performance in Wind with Novel, Fast, Sensors”. |
| Apr 28, 2023 | I will be presenting at the Thousand Islands Fluid Dynamics Meeting (TIM) 2023 in Ontario, CA! See you there! |
| Mar 15, 2023 | I am co-organizing the Lab2Real workshop at ICRA 2023. Submissions due April 14th! |
| Jan 17, 2023 | Our FlowDrone paper was accepted to ICRA 2023 in London, UK! |
| Dec 15, 2022 | I will be presenting a poster at the Learning for Agile Robotics workshop at CoRL 2022 in Auckland, NZ! |
| Nov 19, 2022 | I will be presenting our work at APS DFD 2022 in Indianapolis, IN! |
| Nov 2, 2022 | Our manuscript was accepted to the Journal Measurement Science and Technology! |
| Oct 6, 2022 | I will be presenting a poster at DDDAS 2022 in Cambridge, MA! See you there! |
| Sep 9, 2022 | I will be presenting my work (on FlowDrone) at Princeton MAE Research Day! |
| Jan 25, 2022 | Our project (FlowDrone) was featured in the SEAS Magazine: Small, efficient sensors help drones fly in high winds. |
publications



patents
PhD thesis
talks
MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction- October 11th, 2023: SSR Lab, Princeton University
- November 30th, 2023: International Symposium on Experimental Robotics, Chiang Mai, Thailand.
- March 22nd, 2024: GRASP Lab, University of Pennsylvania
- October 25th, 2024: Amazon Robotics Fall Research Symposium
- March 3rd, 2023: Google Office Princeton
- October 22nd, 2023: PX4 Developer Summit (Slides)
- September 9th, 2022: Princeton MAE Research Day
- November 20th, 2022: APS DFD 2022
- April 29th, 2023: Thousand Islands Fluid Dynamics Meeting
- November 19th, 2023: APS DFD 2023
- October 1st, 2024: AFOSR Program Review, Rome, NY (Virtual)